
GROSAT Synergetic approach
![]() In the framework of ESA “Synergetic retrieval from Ground-based and Satellites measurements: new possibilities for surface characterization and validation” (GROSAT) project (https://www.grasp-sas.com/projects/grosat/), a simultaneous synergistic retrieval of aerosol and surface properties approach (GRASP/GROSAT approach) is developed using combined ground-based AERONET and satellite measurements. In such retrieval the main information about aerosol comes from AERONET direct sun and diffuse sky-radiance measurements, whereas the information about surface reflection properties originates from satellite observations. Such approach allows obtaining the surface reflectance product with enhanced accuracy.
In the framework of ESA “Synergetic retrieval from Ground-based and Satellites measurements: new possibilities for surface characterization and validation” (GROSAT) project (https://www.grasp-sas.com/projects/grosat/), a simultaneous synergistic retrieval of aerosol and surface properties approach (GRASP/GROSAT approach) is developed using combined ground-based AERONET and satellite measurements. In such retrieval the main information about aerosol comes from AERONET direct sun and diffuse sky-radiance measurements, whereas the information about surface reflection properties originates from satellite observations. Such approach allows obtaining the surface reflectance product with enhanced accuracy.
The input for GRASP/GROSAT synergetic retrieval is the AERONET direct sun as well as the diffuse sky ground-based measurements of radiometers combined with the measurements of top of atmosphere atmospheric radiance from satellites collocated with AERONET stations (Figure 1). Using this input GRASP/GROSAT retrieves aerosol and surface parameters fitting the combined measurements.
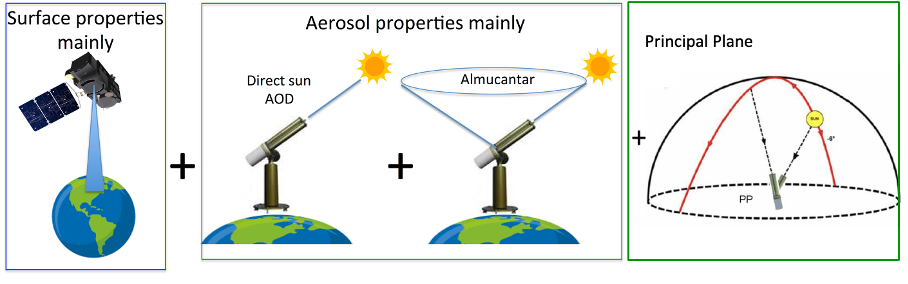 Figure 1: Schematic representation of GROSAT synergetic approach
Figure 1: Schematic representation of GROSAT synergetic approach
The accurate surface characterization from the combined satellite + AERONET measurements can be obtained under the following conditions:
- The forward models for aerosol and surface are accurate enough to reproduce measured atmosphere and total and polarized reflectance.
- Aerosol properties retrieved by GRASP from combined retrieval agree well with AERONET only retrievals.
- The inversion is converged and the fitted residual is sufficiently small (smaller than required accuracy of the surface product).
- Instruments are well calibrated or the information about instrument calibration is known.
If one of the conditions above is not fulfilled, the surface retrieval may suffer from aerosol contamination, biases, degraded retrieval accuracy in different spectral channels etc.
GROSAT surface dataset description
The first GROSAT dataset contains surface full BRDF, BPDF and albedos for 4 satellite sensors (Sentinel-2/MSI, Sentinel-3A/OLCI, PARASOL/POLDER and Sentinel-5p/TROPOMI) over up to 30 AERONET sites (full list can be found in https://www.grasp-sas.com/projects/grosat/), whose global distribution is shown in Figure 2. Table 1 lists the general information of the GROSAT surface dataset.
 Figure 2. Global distribution of 30 AERONET stations used in GROSAT project.
Figure 2. Global distribution of 30 AERONET stations used in GROSAT project.
Table 1: Characteristics of GROSAT surface reference dataset over 30 AERONET stations
| Satellite | Resolution | Dataset: for 30 AERONET stations, 1 year | Area around AERONET | Surface Product |
| S2/MSI | 20m | 2019. Daily, 15 days average, monthly | 2km | BRDF, albedos |
| S3/OLCI | 700m
10km |
2019. Daily, 15 days average, monthly | 14 km
30 km |
BRDF, albedos |
| PARASOL/ POLDER |
6km | 2008. Daily, 15 days average, monthly | 30 km | BRDF, BPDF, albedos |
| S5p/Tropomi | 10km | 2019. Daily, 15 days average, monthly | 30 km |
BRDF, albedos |
The GROSAT product file is contained in NetCDF-4 files typically named as:
GROSAT.{sensor}_{resolution}.{sitename}.nc,
where the sensor is a sensor name, for example, TROPOMI, POLDER, OLCI and MSI, resolution is spatial resolution of the processed data and sitename is an AERONET sitename. The file format is NetCDF-4. The fields that are contained in the product file are listed in Table 2.
Table 2: List of fields contained in the GROSAT product file.
| Name | Unit | Dimension | LongName and Description |
|
Coordinates |
|||
| t | t | date and time of the measurement | |
| y | 1 | y | y-dimension index |
| x | 1 | x | x-dimension index |
| longitude | degrees_east | (y, x) | longitude of the center of the grid cell |
| latitude | degrees_north | (y, x) | latitude of the center of the grid cell |
| wls | nm | wls | wavelength |
| Data variables | |||
| surface_land_brdf_rossli_volumetric_normalized | 1 | (t, y, x) | Ross Li BRDF normalized volumetric parameter |
| surface_land_brdf_rossli_geometric_normalized | 1 | (t, y, x) | Ross Li BRDF normalized geometric parameter |
| surface_land_bpdf_maignan_brenon | 1 | (t, y, x) | Maignan Brenon BPDF parameter |
| surface_land_brdf_rossli_isotropic | 1 | (wls, t, y, x) | Ross Li BRDF isotropic parameter |
| surface_isotropical_bihemispherical_reflectance | 1 | (wls, t, y, x) | Surface Isotropic Bihemispherical Reflectance (White Sky Albedo) |
Note the “t” dimension of the monthly product is filled with the 1st day of the month.
the product is generated at daily, monthly and moving average respectively:
- Daily
- Monthly
- Moving_average
Exponentially weighted moving average (EWMA) was performed with the pandas ewm function (pandas-dev/pandas: Pandas 1.4.4 (v1.4.4). Zenodo. https://doi.org/10.5281/zenodo.7037953) with a 7-day half life (HL) on the daily product time series.
Recommendation for GROSAT data users
We have performed post-processing filtering for the GROSAT dataset to ensure the high quality of the GROSAT surface reference dataset. Generally, the users don’t need any additional filter of the data.
Please, contact us for further information.
Any publication, presentation, or other derivative work based on these results shall acknowledge its use.
Example of acknowledgment:
The authors would like to acknowledge GRASP and CloudFlight teams for GROSAT datasets obtained in the framework of ESA Open Call GROSAT project (https://www.grasp-sas.com/projects/grosat/).
The following documents are recommended as references:
- Dubovik, O., Fuertes, D., Lytvynov, P. et al. A Comprehensive Description of Multi-Term LSM for Applying Multiple Priori Constraints in Problems of Atmospheric Remote Sensing: GRASP Algorithm, Concept, and Applications, Front. Remote Sens., doi: 10.3389/frsen.2021.706851, 2021.
- Litvinov, P., et al. “Models for surface reflection of radiance and polarized radiance: Comparison with airborne multi-angle photopolarimetric measurements and implications for modeling top-of-atmosphere measurements”, Remote Sens. Environ., 115, 781–792, 2011.
- Litvinov, P., Chen, C., Matar, C., Bindreiter, L. et al. Synergetic retrieval from Ground-based and Satellites measurements: new possibilities for surface characterization and validation – Final Report (FR), 2022-12-01.